ロボットをリモコンで操作する方法には、大きく分けて2つあります。
1. 無線による操作(ラジコン方式)
リモコンとロボットは線でつながっておらず、リモコンが送る電波をロボットが受信して動作します。離れた場所から操作できるのが特長です。
2. 有線による操作
リモコンとロボットが電線で直接つながっている方式です。構造がシンプルで、電子工作の入門にも適しています。
有線リモコンの自作
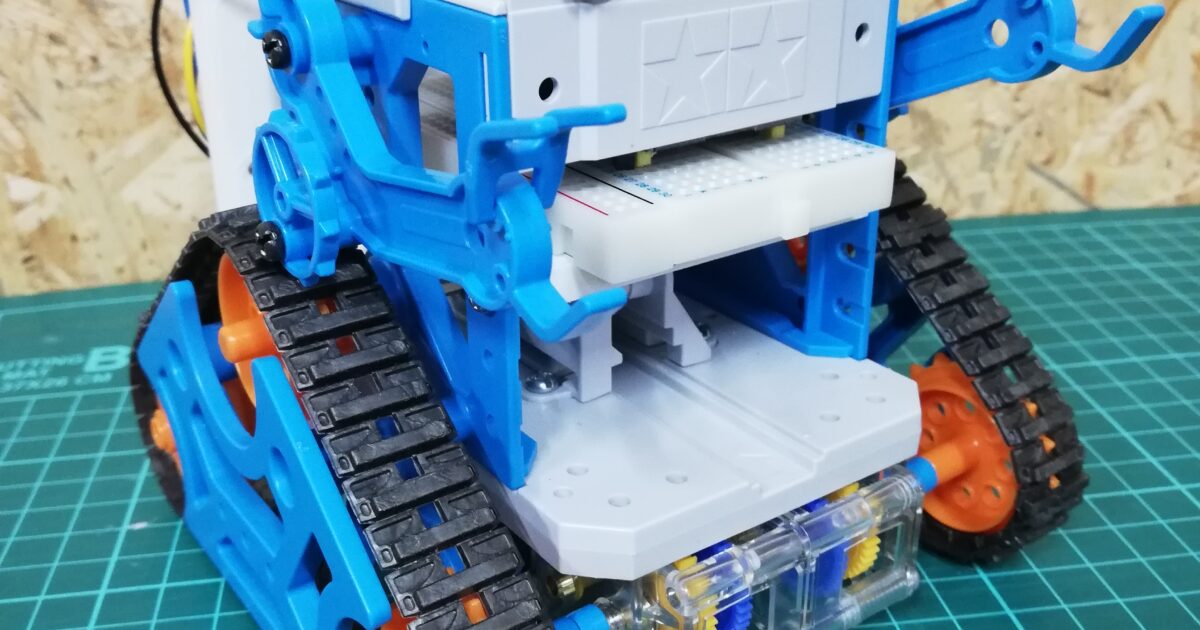
今回は、有線タイプのリモコンを手作りしてみます。手元にあったリミットスイッチを使います。
リミットスイッチとは?
もともとは、機械の動く部分の「限界位置」に取り付け、動きを止めるために使うスイッチです。
今回のようなリモコン操作には必ずしも、リミットスイッチである必要はありません。重要なのは、3つの端子(COM, NO, NC)があることです。
スイッチの端子と動作
- COM(共通端子)
- NO(ノーマルオープン):スイッチを押すとCOMとつながる
- NC(ノーマルクローズ):スイッチを押すとCOMとの接続が切れる
これらをうまく組み合わせることで、1つのモーターを正転・逆転させる回路を作ることができます。

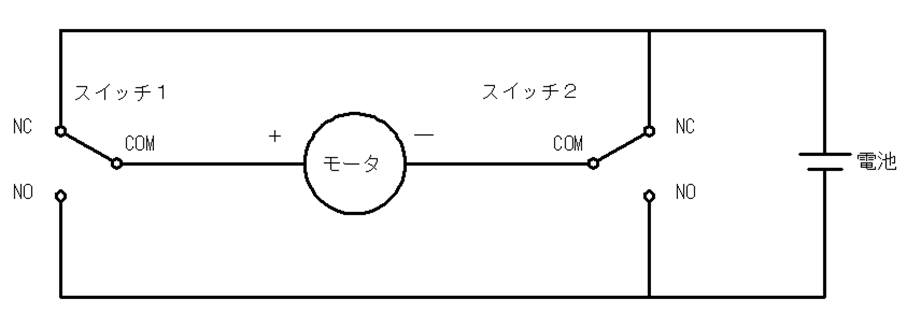
モーター制御の回路図
下図は、リミットスイッチ2つで1つのモーターの回転方向を制御する回路の例です。
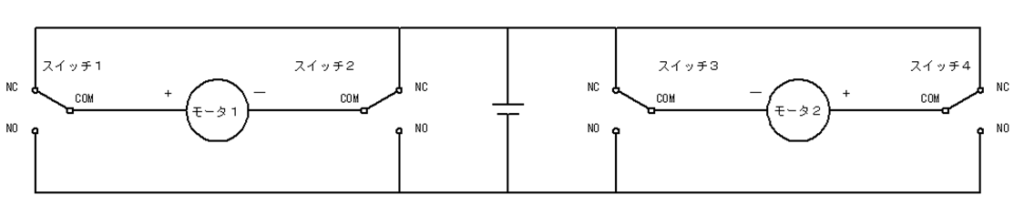
モーターを2つ制御する場合
ロボットの、左右2つのモーターをそれぞれ制御するには、スイッチも2倍(計4つ)必要になります。